Самый дешевый робот, аналог Spot от Boston Dynamics
Внешне робот AlphaDog действительно очень похож на роботизированную собаку Spot от Boston Dynamics. Единственное визуальное отличие заключается разве что в цвете корпуса: оригинальный робот желтый, а копия — красная. Подробностей о технических характеристиках робота нет, но он явно оснащен датчиками для измерения расстояния до объектов и другой электроникой. Также производитель упомянул, что выполнение задач возможно благодаря искусственному интеллекту. В общем, датчики собирают информацию, а внутренний компьютер решает, что с ними делать и дает команды двигателям. Все работает примерно так же, как и у робота Boston Dynamics.

В будущем AlphaDog сможет заменить собой собак-поводырей
Одним из главных преимуществ робота AlphaDog над Spot является скорость ходьбы. На видеоролике ниже можно увидеть, как китайская копия разгоняется до 3 метров в секунду, а это более 10 километров в час! Для сравнения, робот Spot может ходить только со скоростью около 5 километров в час. По данным издания Gizmochina, робота AlphaDog на данный момент можно считать самым быстрым. Если учесть, что он так же хорошо удерживает равновесие, как и детище Boston Dynamics, компания Welian явно проделала очень большую работу и достойна похвалы.

Демонстрация робота AlphaDog
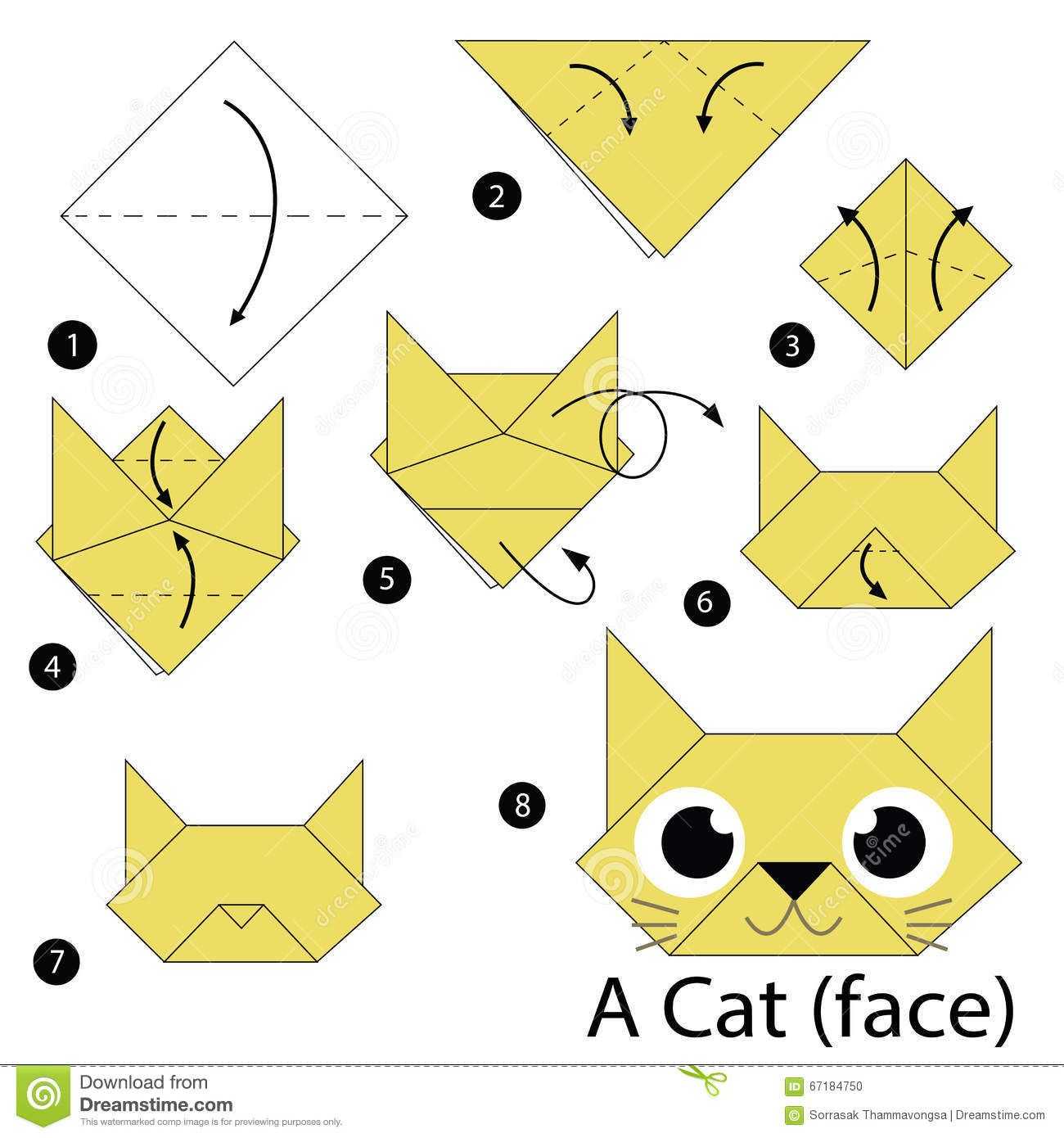
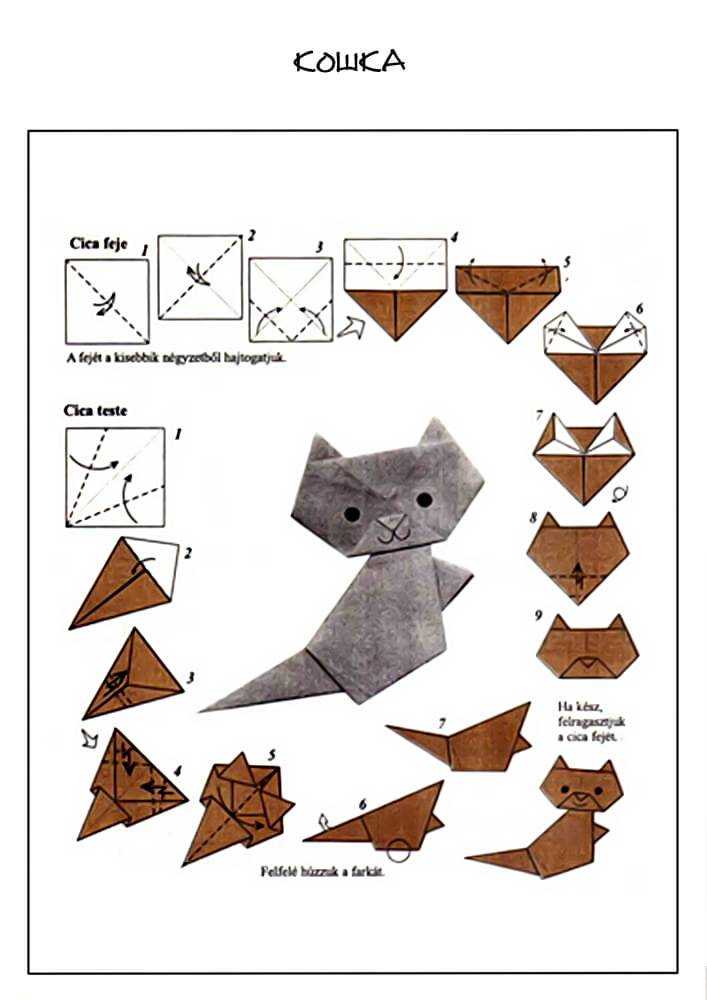
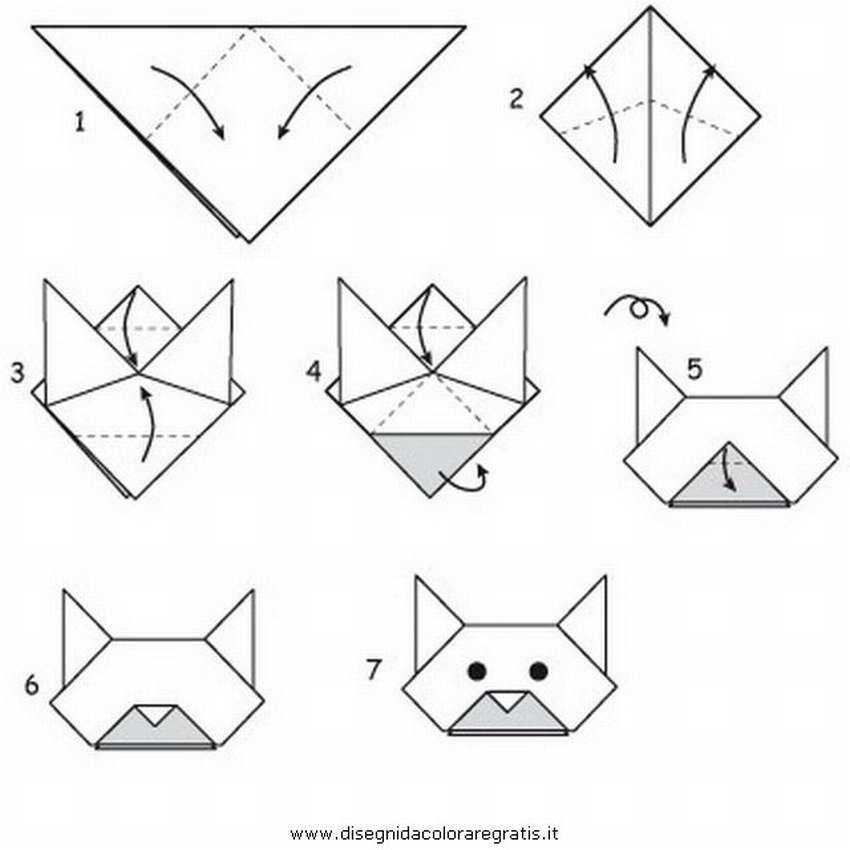
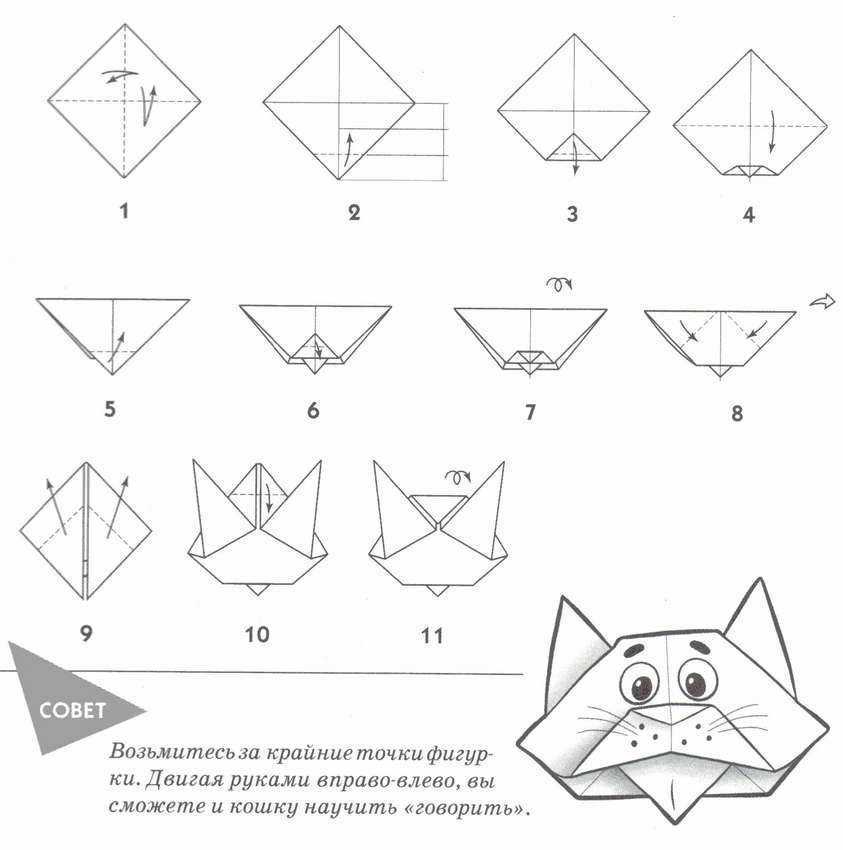
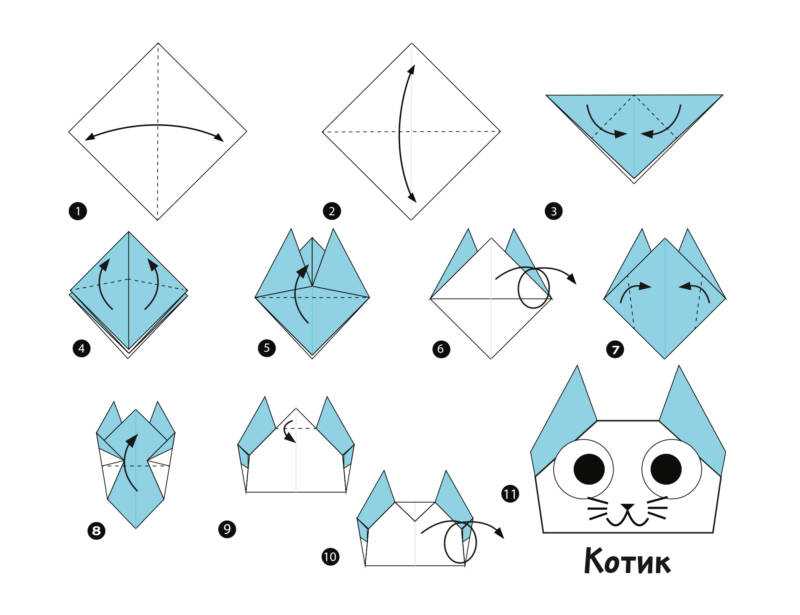
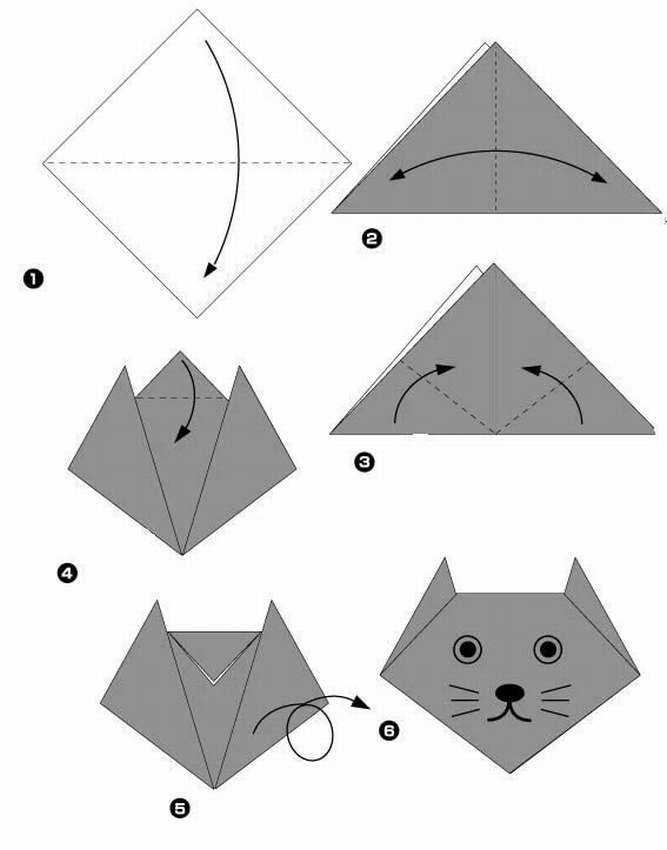
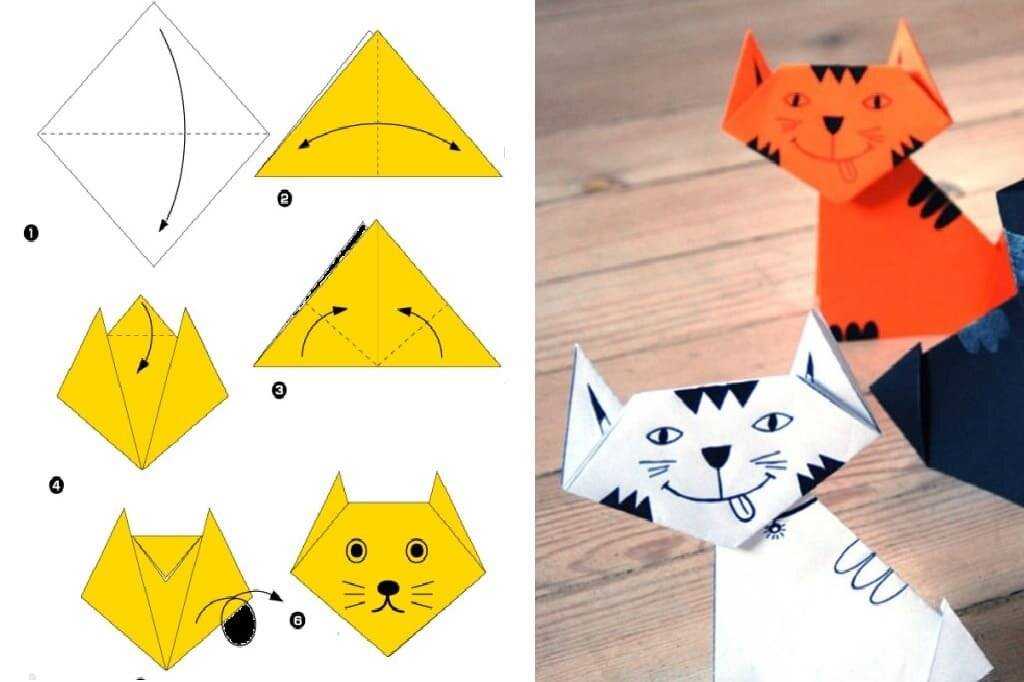
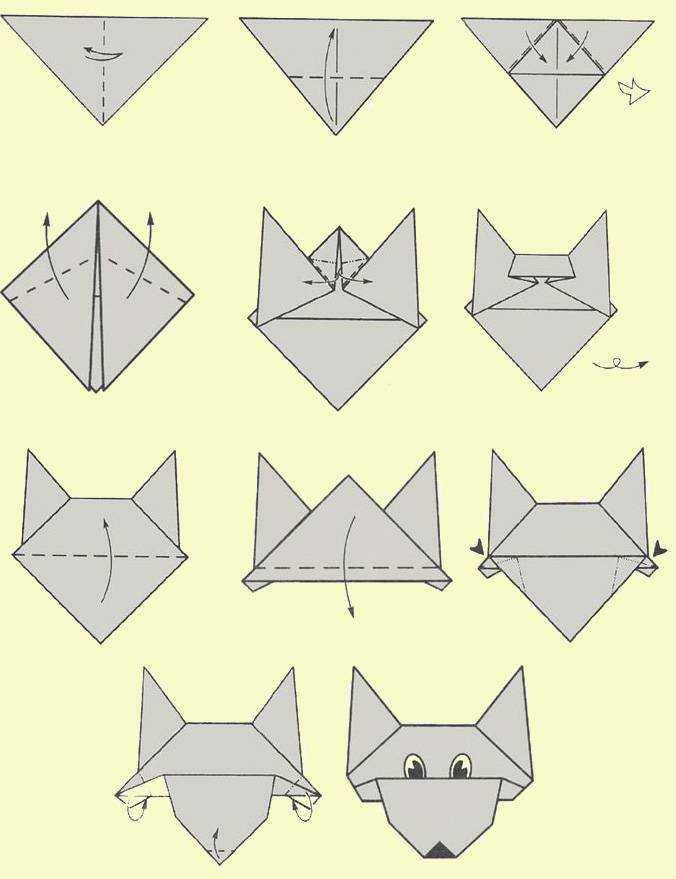
Простой бумажный робот
Чтобы создать поделку робот из бумаги необходимо запастись следующими материалами:
- схема робота;
- лист бумаги;
- ножницы;
- клей.
Помимо того может понадобится также картон, иголка или шило, фломастеры и резинки для соединения частей.
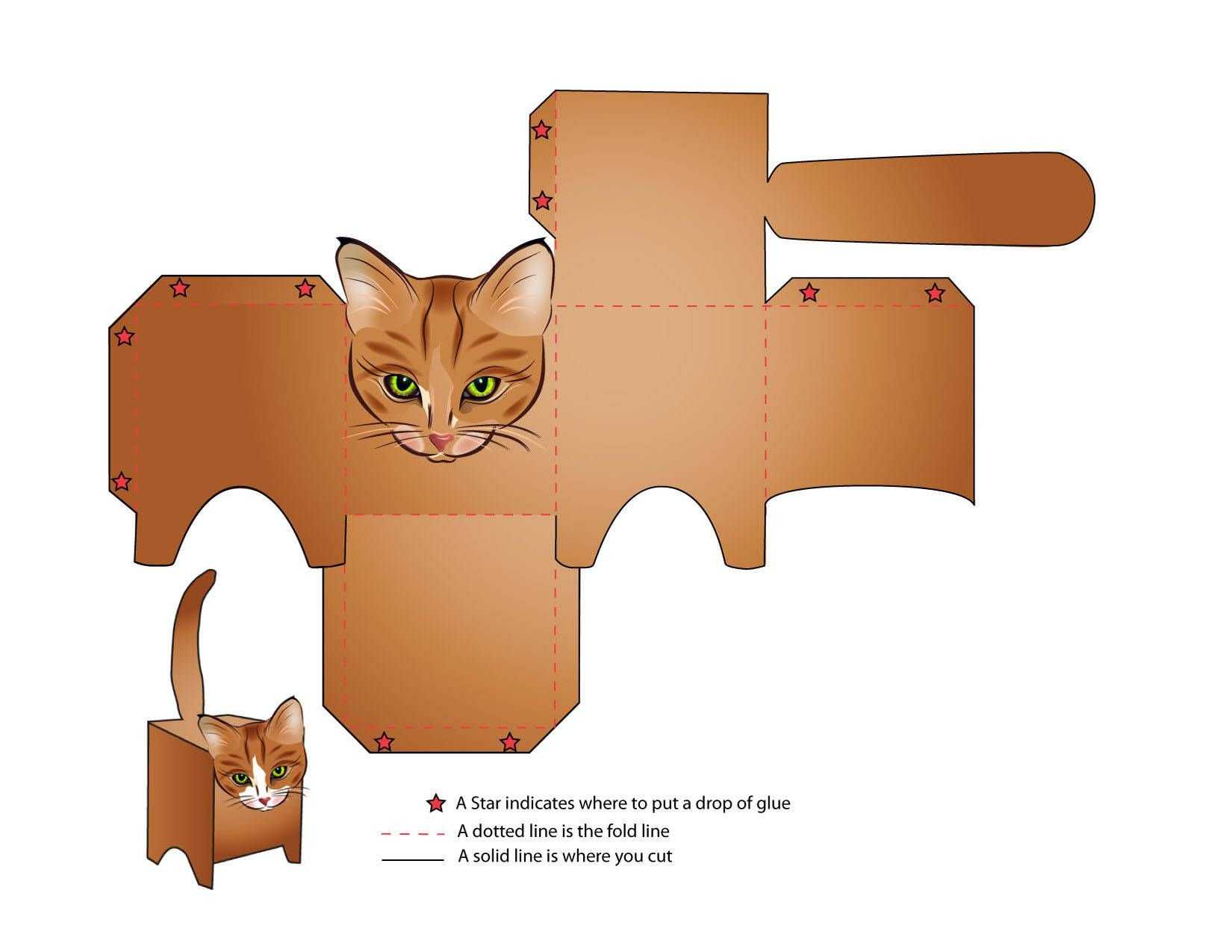
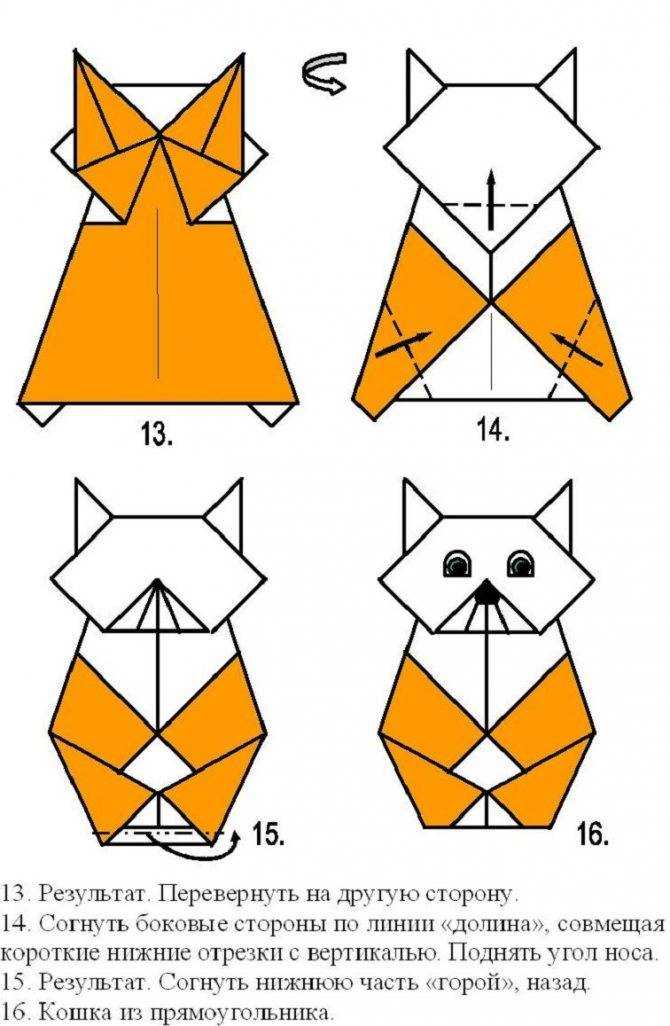
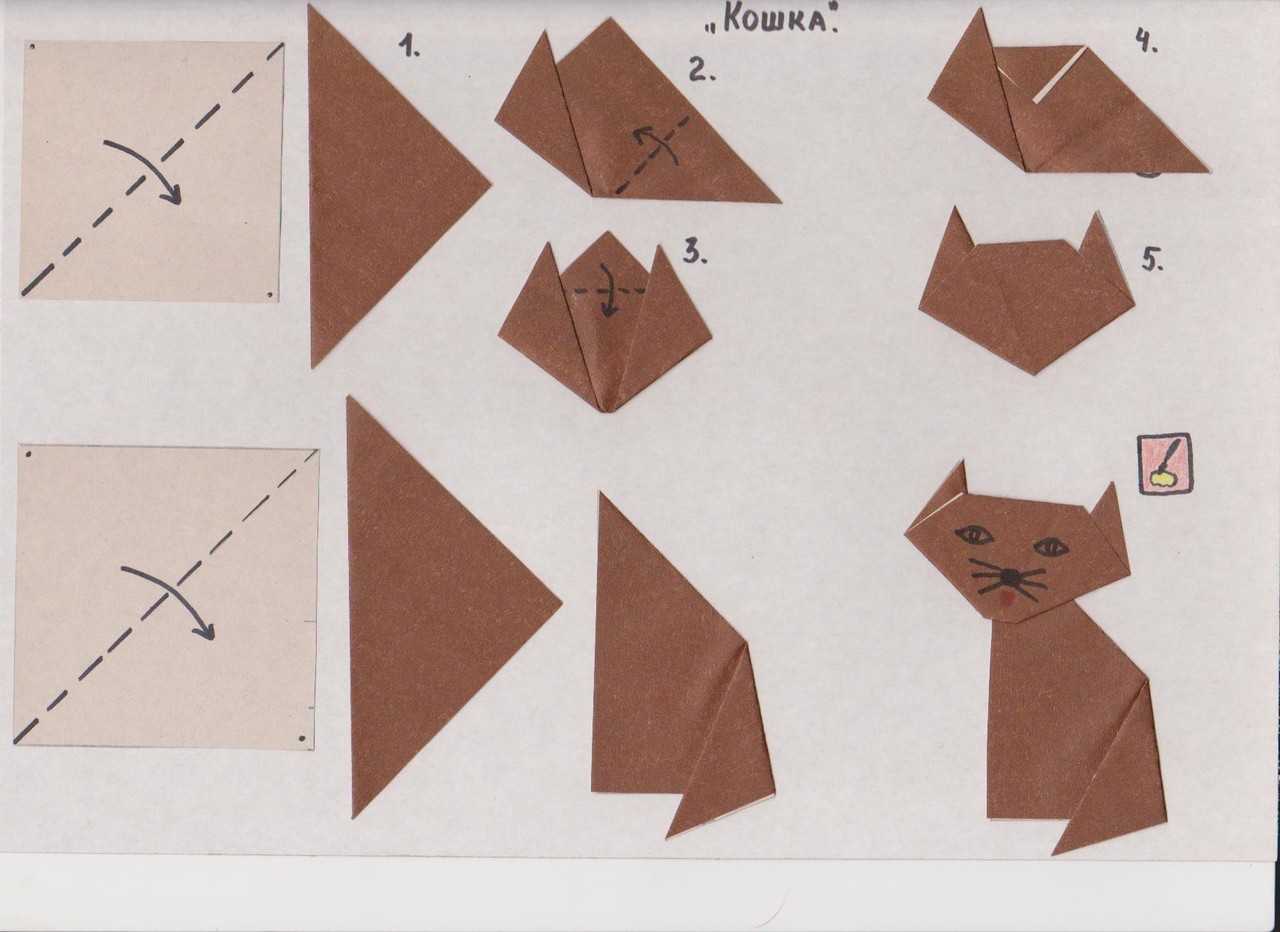
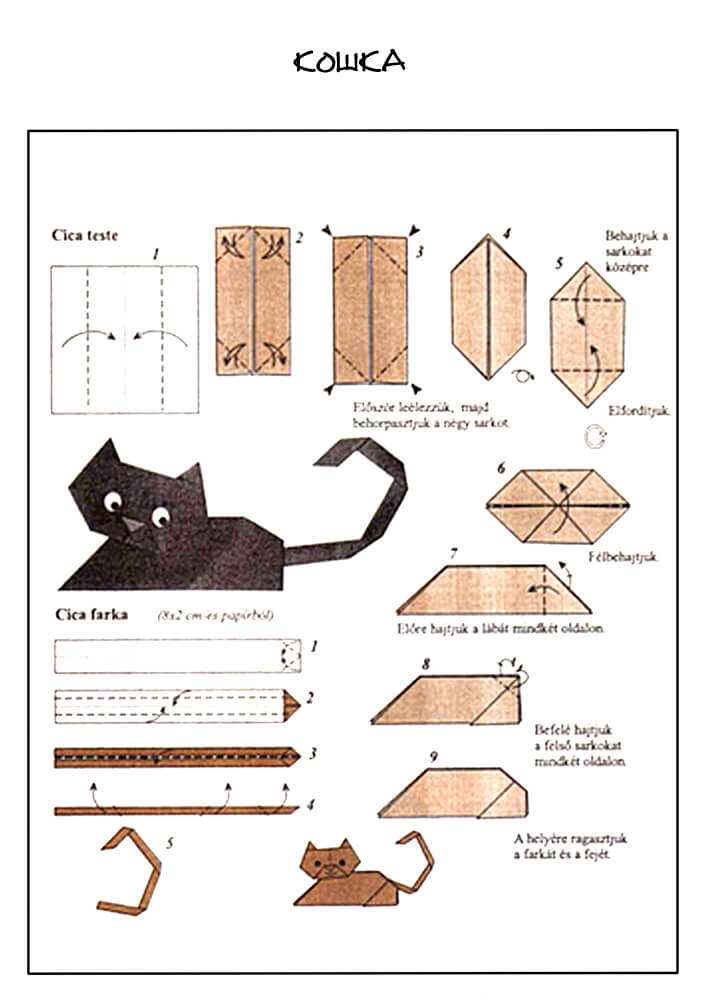
На схемах можно увидеть несколько типов линий. Разрез ножницами предусмотрен по сплошной линии. Пунктирные очертания предназначены для сгибания бумаги.
При необходимости сделать отверстия, используете иглу или канцелярский нож до вырезания макета. Для наглядного представления готовой игрушки согните все части по пунктирным линиям, как видно на фото поделки робот.
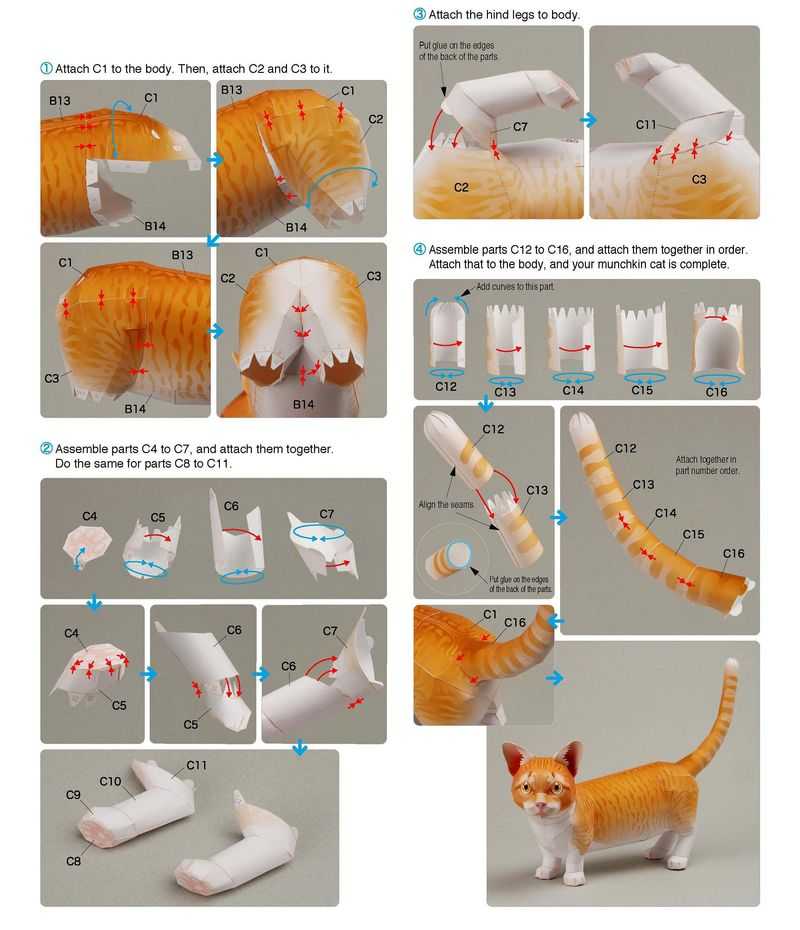
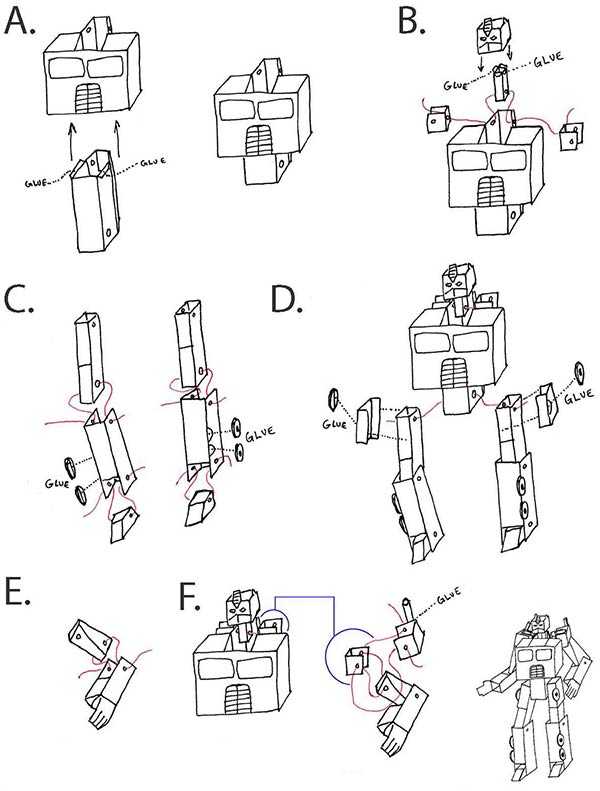
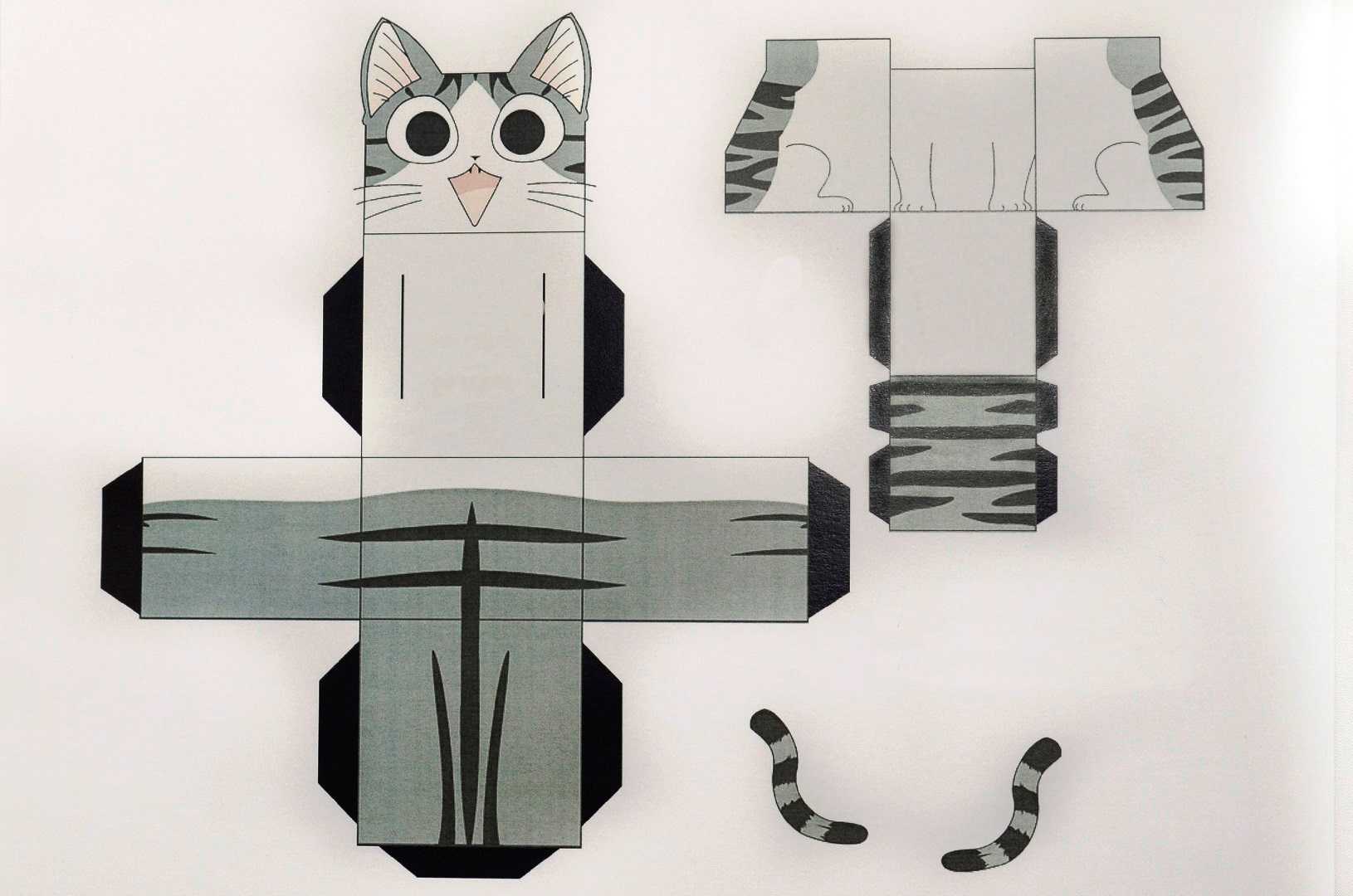
Поделку робот из картона делают так:
- сделать распечатку схемы на картоне;
- ножницами вырезать все части схемы, действуя по инструкции;
- вырезанные детали сгибаем по пунктирным линиям;
- соединяем необходимые части с помощью клея;
- делаем сбор всех деталей робота в одну бумажную конструкцию, следуя инструкции.
Как сделать робота-кота из LEGO в стиле Фортнайт
Любите Фортнайт и LEGO? Тогда у вас есть прекрасная возможность создать своего собственного робота-кота в стиле этой популярной игры! Следуя этой пошаговой инструкции, вы сможете собрать уникальную фигурку, которая будет радовать не только глаз, но и превосходно вписываться в игровую атмосферу.
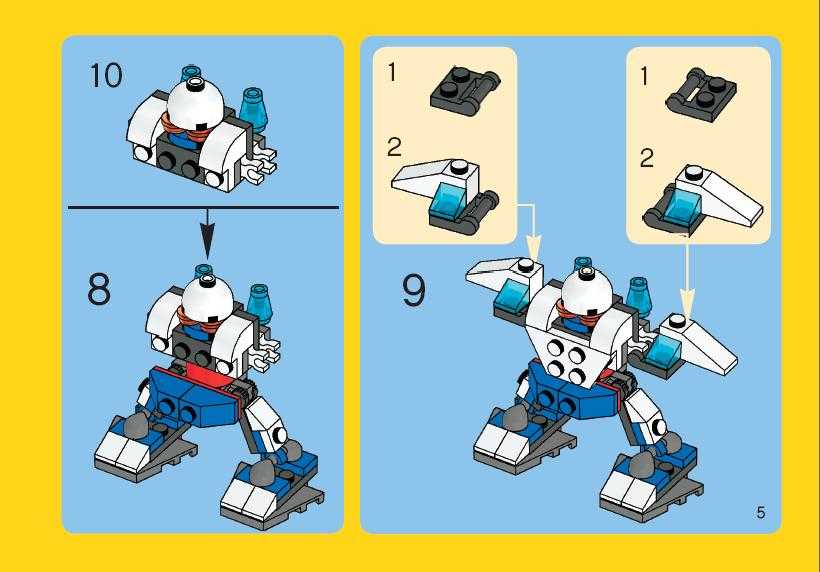
Шаг 1: Соберите все необходимые детали
Перед тем, как приступить к сборке, убедитесь, что у вас есть все необходимые детали LEGO. Для создания робота-кота в стиле Фортнайт вам понадобятся: корпус фигурки, голова с ушами, ноги, хвост и декоративные элементы, такие как оружие или аксессуары.
Страница инструкции обязательно должна быть открытой для удобства сборки. Если вам не хватает каких-то деталей, вы можете придумать альтернативные варианты или заказать недостающие детали через интернет.
Помните, что сборка фигурки — это креативный процесс, и вы можете внести свои улучшения и изменения в оригинальный дизайн робота-кота. Это позволит вам создать поистине уникальную фигурку, которая будет отражать вашу индивидуальность.
Шаг 2: Соедините основные части
Начните сборку с основного корпуса фигурки. Соедините все части вместе так, чтобы получилась укрепленная и прочная конструкция. Убедитесь, что части правильно стыкуются друг с другом и надежно крепятся.
Корпус фигурки должен иметь стабильное основание и открытые отверстия для присоединения других частей. Также стоит проверить, что голова фигурки хорошо закреплена и не легко отваливается.
Шаг 3: Добавьте декоративные элементы
Теперь пришло время добавить декоративные элементы, которые придадут вашей фигурке стиль и неповторимость. Можете использовать оружие или аксессуары, которые характерны для Фортнайт, чтобы создать настоящую игровую атмосферу.
Обратите внимание на детали и пропорции, чтобы ваша фигурка выглядела гармонично и эстетично. Это позволит достичь большей реалистичности и соответствия стилистики Фортнайта
Шаг 4: Завершите сборку и наслаждайтесь результатом
Как только все части собраны и декоративные элементы добавлены, ваш робот-кот в стиле Фортнайт почти готов и остается только завершить сборку. Убедитесь, что все части надежно закреплены, чтобы ваша фигурка была устойчивой и не разваливалась.
Создание робота-кота из LEGO в стиле Фортнайт — это отличный способ проявить свою креативность и страсть к играм и конструкторам. Удачи в сборке!
Настройка параметров кота робота
После сборки кота робота важно настроить его параметры, чтобы он работал эффективно и соответствовал вашим требованиям. Вот несколько шагов, которые необходимо выполнить для настройки параметров кота робота:
- Подключите кота робота к компьютеру или мобильному устройству с помощью USB-кабеля.
- Запустите программу управления котом роботом на вашем компьютере или мобильном устройстве.
- Выберите язык, в котором будет работать кот робот. Обычно доступны несколько языков, включая русский и английский.
- Настройте голосовые команды для кота робота. Многие коты роботы могут выполнять команды по голосовым указаниям. Запишите свои голосовые команды и привязывайте их к определенным действиям.
- Определите режим работы кота робота. Вы можете выбрать, как кот будет взаимодействовать с вами и окружающими. Некоторые коты роботы могут выполнять разные режимы, такие как игра, сон или демонстрация.
- Настройте уровень громкости и яркости кота робота. Вы можете настроить громкость звуковых эффектов и яркость светодиодных индикаторов кота робота в соответствии с вашими предпочтениями.
- Изучите дополнительные функции и настройки кота робота. В зависимости от модели кота робота, у вас может быть доступ к различным дополнительным функциям и настройкам, таким как танцы, игры или постановка задач.
После настройки всех параметров кота робота, проверьте его работу и убедитесь, что все функции работают правильно. Если возникают проблемы, обратитесь к инструкции пользователя или свяжитесь с технической поддержкой производителя.
Makeblock Neuron Inventor Kit
Makeblock Neuron Inventor Kit — это конструктор для STEM-обучения, из которого в прямом смысле слова можно собрать все, что угодно. Модули выполнены таким образом, что юные инженеры без проблем сконструируют кота, динозавра, кролика, электрогитару, игрушечную бомбу с таймером, диджейский пульт, безумного робота и другое.
Строительные блоки крепятся с помощью магнитов — это наиболее устойчивый и удобный вариант. Они надежно держатся друг на друге и на металлических поверхностях. Соединительные элементы конструктора совместимы с LEGO.
Makeblock Neuron Inventor Kit программируется и управляется с помощью приложения на смартфоне
Для программирования действий не нужно прописывать код — набор собирается из цветных блоков на основе логических связей, с которыми справится даже дошкольник (хотя игрушка рекомендована детям старше 6 лет). В интуитивно понятном приложении Neuron есть видеоинструкции и учебные пособия: ребенок может использовать готовые программы, а может сам создавать их.
Setup Process:
To configure the board:
-
Download the repo and unfold. Remove the -main (or any branch name) suffix of the folder.
-
Open the file OpenCat.ino, select your robot and board version.
- Comment out so that it will turn the code to the board configuration mode. Upload and follow the serial prompts to proceed.
-
If you activate , the program will automatically set up without prompts. It will not reset joint offsets but calibrate the IMU. It’s just a convenient option for our production line.
-
-
Plug the USB uploader to the NyBoard and install the driver if no USB port is found under Arduino -> Tools -> Port.
-
Press the upload button (->) at the top-left corner in Arduino IDE.
-
Open the serial monitor of Arduino IDE. You can find the button either under Tools, or at the top-right corner of the IDE.
Set the serial monitor as no line ending and 115200 baud rate.
The serial prompts:
Input ‘Y’ and hit enter, if you want to reset all the joint offsets to 0.
The program will do the reset, then update the constants and instinctive skills in the static memory.
- IMU (Inertial Measurement Unit) calibration.
The serial prompts:
Input ‘Y’ and hit enter, if you have never calibrated the IMU or want to redo calibration.
Put the robot flat on the table and don’t touch it. The robot will long beep six times to give you enough time. Then it will read hundreds of sensor data and save the offsets. It will beep when the calibration finishes.
When the serial monitor prints «Ready!», you can close the serial monitor to do the next step.
- Uncomment to make it active. This time the code becomes the normal program for the major functionalities. Upload the code.
When the serial monitor prints «Ready!», the robot is ready to take your next instructions.
-
If you have never calibrated the joints’ offsets or reset the offsets in Step2, you need to calibrate them. If you boot up the robot with one side up, it will enter the calibration state automatically for you to install the legs. Otherwise, it will enter the normal rest state
-
You can use the serial monitor to calibrate it directly. Or you may plug in the Bluetooth dongle, and use the Petoi app (on Android/iOS) for a more user-friendly interface. The mobile app is available on:
You can refer to the calibration section in the user manual (https://bittle.petoi.com/6-calibration) and Guide for the Petoi App(https://docs.petoi.com/app-guide).
- you can use the infrared remote or other applications (such as the Petoi App, python, serial monitor … etc.) to play with the robot (https://bittle.petoi.com/7-play-with-bittle).
For updates:
- star this repository to receive timely notifications on changes.
Что такое LEGO Boost
Lego Boost – это развивающий конструктор, состоящий из 847 деталей. из них можно собрать на выбор одну из 5-ти моделей:
1. Робот Верни2. Кот Фрэнки3. Гитара 40004. Фабрика роботов5. Вездеход (M.T.R.4)
Основными элементами каждой модели являются 3 детали: это основной механический блок, датчик определения цветов и расстояния и интерактивный двигатель.
Основной механический блок является «сердцем» LEGO Boost, который приводит собранный конструктор в движение. Именно к нему можно подключить свой iPhone или iPad, чтобы запрограммировать собранную модель на выполнение разных команд и даже общение с владельцем.
К механическому блоку подключаются два других: датчик цвета и расстояния реагирует на внешние раздражители, помогая игрушке объезжать препятствия или следовать своему сценарию поведения при виде определённого цвета, а интерактивный двигатель оживляет конструктор, вращая гусеницы или колёса (смотря что соберёте).
Для программирования конструктора понадобится приложение LEGO Boost Creative Toolbox . Скачать его придётся в обязательном порядке, потому что в коробке с конструктором нет бумажных инструкций – все этапы сборки каждой из 5-ти моделей наглядно показываются в приложении.
Про каждую модель можно написать отдельный обзор, но я расскажу кратко о возможностях каждого робота LEGO Boost:
Покупка и сборка необходимых компонентов
Перед тем как начать сборку кота робота, необходимо приобрести все необходимые компоненты
Важно убедиться, что у вас есть следующие детали:
Корпус и набор деталей: Вы можете либо приобрести готовый набор для сборки кота робота, либо изготовить его самостоятельно из доступных материалов. Корпус должен быть достаточно прочным и иметь отверстия для установки других компонентов.
Моторы: Вам потребуются два небольших мотора для передвижения кота робота
Обратите внимание на их скорость и мощность, чтобы быть уверенным, что они достаточные для движения кота.
Колеса и ося: Колеса должны быть совместимы с моторами и иметь достаточную амортизацию для гладкой езды. Оси должны быть прочными и правильно соединены с колесами.
Плата управления: Для управления котом роботом вам потребуется микроконтроллер или другая плата управления
Выберите плату, которая поддерживает необходимые функции и имеет достаточно высокую производительность.
Датчики: Кот робот должен быть оснащен различными датчиками для обнаружения препятствий, измерения расстояния и определения своего положения. Приобретите необходимые датчики в соответствии с требованиями вашего проекта.
Компоненты электропитания: Вам понадобится батарея или иной источник питания для питания моторов и платы управления. Убедитесь, что выбранный источник питания соответствует требованиям вашего проекта.
Дополнительные компоненты: В зависимости от ваших планов и требований проекта, также могут потребоваться дополнительные компоненты, такие как реле, светодиоды, разъемы и т.д. Сделайте список всех необходимых компонентов и приобретите их по мере необходимости.
После покупки всех компонентов вы готовы к сборке кота робота. Следуйте инструкциям производителя, если вы приобрели готовый набор для сборки. Если вы собираете кота робота самостоятельно, используйте руководства и схемы, доступные онлайн или в книгах по робототехнике.
Не торопитесь, проведите сборку медленно и аккуратно, чтобы быть уверенными, что все компоненты установлены правильно. Проверьте все соединения и убедитесь, что все детали надежно закреплены. Готовый кот робот станет вашим верным спутником и источником удовольствия.
Как выбрать микроконтроллер правильно?
Если вы изучаете робототехнику, то вам понадобится микроконтроллер для любого робототехнического проекта. Для новичка, выбор правильного микроконтроллера может показаться сложной задачей. Особенно учитывая ассортимент, технические характеристики и области применения. Есть много различных микроконтроллеров доступны на рынке:
- Ардуино
- BasicATOM
- BasicX
- Lego EV3
- и многие другие
Какой микроконтроллер самый популярный для моего приложения?
Конечно, создание роботов и электронных проектов в целом-это не конкурс популярности. Очень хорошо если микроконтроллер имеет большую поддержку сообщества. И успешно используется в похожих или даже одинаковых ситуациях. В результате это может значительно упростить этап проектирования. Таким образом, вы могли бы извлечь пользу из опыта других пользователей, как среди любителей, так и среди профессионалов.
Участники сообществ конструкторов роботов делятся друг с другом результатами, кодами, картинками, видео, и подробно рассказывают об успехах и даже неудачах. Все это является доступными материалами и возможностью получать советы от более опытных пользователей. Следовательно, может оказаться очень ценным.
Есть какие-то особенные требования у вашего робота?
Микроконтроллер должен быть способен выполнять все специальные действия вашего робота, чтобы функции исполнялись правильно. Некоторые особенности являются общими для всех микроконтроллеров (например, наличие цифровых входов и выходов, возможность выполнять простые математические действия, сравнение значений и принятие решений).
Возможно другим контроллерам требуется специфическое оборудование (например, АЦП, ШИМ, и коммуникационный протокол поддержки)
Также требования к памяти и скорости, а также число выводов должны быть приняты во внимание
Какие компоненты доступны для конкретного микроконтроллера?
Может быть ваш робот имеет специальные требования или необходим конкретный датчик или компонент. И это имеет решающее значение для вашего проекта. Следоваетльно выбор совместимого микроконтроллера, безусловно, очень важен.
Большинство датчиков и компонентов может взаимодействовать напрямую со многими микроконтроллерами. Хотя некоторые комплектующие предназначены для взаимодействия с конкретным микроконтроллером. Возможно они будут уникальными и несовместимыми другими типами микроконтроллеров.
Что нас ждет в будущем?
Цена на компьютеры резко идет вниз, и достижения в области технологии делают их меньше и эффективнее. В результате одноплатные компьютеры стали привлекательным вариантом для роботов. Они могут работать с полноценной операционной системой (Windows и Linux являются наиболее распространенными).
Дополнительно компьютеры могут подключаться к внешним устройствам, таким как USB-устройства, жидкокристаллические дисплеи и т. д. В отличие от своих предков, эти одноплатные компьютеры, как правило, значительно меньше потребляют электроэнергии.
Работа с программным обеспечением
После того, как вы построили физическую структуру робота-кота, настало время приступить к программированию его функций. Для этого вам потребуется специальное программное обеспечение, которое позволит вам управлять роботом и задавать ему определенные действия.
Одним из наиболее популярных и удобных инструментов для программирования роботов из LEGO является среда разработки LEGO Mindstorms EV3. Эта среда предоставляет широкие возможности для создания и настройки программ для роботов, включает в себя графический интерфейс и интуитивно понятные инструменты.
Для начала работы вам потребуется подключить ваш робот-кот к компьютеру с помощью USB-кабеля и установить программное обеспечение LEGO Mindstorms EV3. После установки запустите среду разработки и создайте новый проект для вашего робота-кота.
Внутри среды разработки вы найдете набор блоков и инструкций, которые можно комбинировать, чтобы задать роботу различные действия. Например, вы можете задать роботу двигаться вперед на определенное расстояние, поворачивать в разные стороны, издавать звуки, реагировать на сигналы и многое другое.
Чтобы составить программу для вашего робота-кота, просто перетащите нужные блоки на поле программирования и соедините их между собой. Затем настройте параметры каждого блока, чтобы робот выполнил нужные вам действия.
Когда ваша программа готова, вы можете загрузить ее в робота и запустить. Робот-кот с помощью программного обеспечения будет выполнять заданные вами команды и оживать перед вашими глазами.
Не бойтесь экспериментировать и настраивать программу своего робота-кота. Вы можете добавить новые функции, изменить поведение робота или даже создать собственную игру с его участием. Возможности программирования LEGO Mindstorms EV3 практически неограничены, поэтому просто воплотите свою фантазию в жизнь!
Ключевые моменты:
- Установите программное обеспечение LEGO Mindstorms EV3 на свой компьютер
- Подключите робота-кота к компьютеру с помощью USB-кабеля
- Создайте новый проект в среде разработки LEGO Mindstorms EV3
- Используйте блоки и инструкции для задания роботу нужных действий
- После завершения программы, загрузите ее в робота и запустите
- Экспериментируйте и настраивайте программу, чтобы создать уникального робота-кота в стиле Фортнайт!
Робот, различающий препятствия
Перед сборкой интеллектуального устройства обдумывают его внешний вид и принцип передвижения. Оптимальный вариант – использование гусеничной цепи (как в танке).
Такими роботами легче управлять, и они способны передвигаться по любому типу поверхности. Снять гусеницы, моторчик и редуктор можно с игрушечного танка.
Инструменты и запчасти
Перед созданием робота следует подготовить:
- микроконтроллер (ATmega 16 в корпусе Dip-40);
- керамические конденсаторы 0,1 мкФ, 1 мкФ, 22 пФ;
- резисторы на 25 Вт номиналом 10 кОм (1 единицу) и 220 Ом (4 штуки);
- диод 1N4004;
- L7805 в корпусе ТО-220;
- паяльник;
- инфракрасные диоды (2 шт.);
- фототранзисторы, способные реагировать на длину ик-лучей;
- резонатор кварцевый на 16 МГц;
- мультиметр;
- радиодетали;
- гусеницы и мотор от игрушечного экскаватора, танка.
Работа с платой
Для обеспечения питания микроконтроллера подбирают стабилизатор напряжения. Оптимальный выбор – микросхема L7805, дающая на выходе стабильные 5 В. Дополнением к ней идут конденсаторы для сглаживания напряжения и диоды, защищающие от переполюсовки.
Далее осматривают корпус контроллера MK-Dip и выделяют в нем узлы:
Управление двигателями
В приспособлении используется микросхема L293D со встроенными диодами, которые защищают систему от перегрузки. Она имеет 2 канала, что позволяет подключить сразу 2 двигателя. Моторчики на плате запрещено присоединять напрямую к МК. Контакт обеспечивается с помощью ключевых транзисторов.
Во время работы возможен нагрев микроэлектронного устройства. Для отведения тепла предусмотрены ножки GND, которые следует распаивать на контактной площадке.
Установка датчиков препятствий
Ориентирование робота в пространстве обеспечивает простой инфракрасный датчик. Он состоит из диода, способного излучать в инфракрасном диапазоне, и фототранзистора для приема лучей. В отсутствии преграды перед механизмом транзистор закрыт.
При его приближении к мебели, стене, элементы улавливают тепло. Транзистор открывается, что активирует течение тока по цепи и побуждает устройство изменять траекторию движения.
Прошивка робота
Для работы устройства требуется программа, которая позволит снимать показания с датчиков и управлять двигателями. Простым роботам ее пишут с использованием языка программирования Си. Он представляет собой набор функций, вызывающих друг друга для дополнения.
Прописывая команды, следует учесть, что по инструкции у робота 2 датчика. Если на 1 из фототранзисторов поступает свет от инфракрасного диода, механизм начинает движение назад, отъезжая от препятствия. Он разворачивается и снова едет вперед.
Наличие преград следует проверять справа и слева, что прописывается с помощью команд. Алгоритм работы можно усовершенствовать, задав командную строку, что делать при возникновении угрозы прямого столкновения.
Улучшить готовый механизм позволит энкодер, который распознает положение робота в пространстве. Для информативности в дальнейшем устанавливается дисплей, на котором будет отображаться отладочная информация, расстояние до препятствий и другие нужные сведения.
Наилучший вариант знакомства детей с миром робототехники — конструирование и программирование Lego-роботов (EV3 и Boost).
Сбер купил робота-собаку от Boston Dynamics
В январе 2021 года Сбер купил робособаку Boston Dynamics. Робот появился впервые в России и прогулялся по корпоративному университету банка. Об этом сообщалось в телеграм-канале Сбера.
«Сбер первым в России показал роботехническую платформу, созданную BD. Она приобретена в образовательных и исследовательских целях», — пояснили в банке.
Мы в редакции пока не очень представляем чем может заниматься собака-робот в Сбере, может быть доставлять карты клиентам?
Четвероногий робот Spot от Boston Dynamics способен развить скорость до 5,76 км/ч (1,6 м/с) и работать до полутора часов автономно. Он имеет сменную батарею. Робот оснащен системой стереокамер, которые дают ему обзор в 360°, что позволяет ему ориентироваться в пространстве. Spot способен поднимать грузы весом до 14 кг и работает в диапазоне температур от -20°С до +45°С. Робот весит тридцать два килограмма и может проработать от батарей до полутора часов.
Spot поставляется с SDK для разработки программного обеспечения. С его помощью можно управлять скоростью робота, настраивать полезную нагрузку и получать доступ к данным робота. Boston Dynamics опубликовала SDK, документацию и простые программы-примеры для робота в общем доступе на GitHub, чтобы разработчики могли создавать собственные приложения для взаимодействия с роботом и тем самым обучать его новым возможностям.
Программирование
Когда все компоненты кота-робота успешно собраны, настало время приступить к программированию. Программирование позволит внедрить в кота-робота набор инструкций, которые он будет выполнять по вашей команде.
В первую очередь, необходимо установить на компьютер программное обеспечение, которое позволит вам программировать кота-робота. Для этого загрузите и установите специальное программное обеспечение с официального сайта производителя.
После установки программного обеспечения подключите кота-робота к компьютеру с помощью USB-кабеля. Запустите программу и выберите режим программирования. Возможно, вам потребуется следовать инструкциям и подключиться к Интернету, чтобы обновить прошивку кота-робота.
Когда все настройки выполнены, вы можете начать создавать свои собственные программы для кота-робота. Для этого используйте специальный графический интерфейс программирования, который позволяет добавлять и редактировать блоки с командами.
Выберите нужные блоки команд, такие как двигаться вперед, поворачивать, издавать звуки и др., и разместите их в нужном порядке. Вы также можете добавить условия и циклы для управления поведением кота-робота.
После того как программа создана, загрузите ее на кота-робота и запустите. Наблюдайте за тем, как ваш кот-робот выполняет заданные команды и взаимодействует с окружающей средой.
Помните, что программирование – это творческий процесс, и вы можете экспериментировать с разными командами и последовательностями. Играйтесь с программой, добавляйте новые блоки, обучайте кота-робота новым трюкам и командам. Возможности программирования кота-робота ограничены только вашей фантазией!
LEGO Education Mindstorms EV3
У конструктора LEGO Mindstorms EV3 две версии — Home (домашняя) и Education (образовательная). Набор Home больше подойдет детям 5-9 лет и для игровых целей; если же ребенок старше 10 лет или всерьез увлекается программированием, то стоит купить Education — у него больше датчиков. Например, ультразвуковой сенсор в старшей модели гораздо точнее определяет расстояние, чем инфракрасный, который используется в Home. Также в обучающей версии робота есть гироскоп, датчики прикосновения и цвета.



LEGO Education Mindstorms EV3 относят к серьезной робототехнике и используют для обучения детей программированию
Из 541 детали собирают роботов для самых разных задач. Робот Color Sorter самостоятельно сортирует детали по цветам (с помощью датчика цвета), робот-сигвей ездит и балансирует на месте, робо-рука перемещает предметы, как настоящий строительный кран. Есть даже робот-собачка, которая умеет «есть», «спать», «гавкать» и реагировать на ласку.
Игрушка программируется и управляется с помощью компьютера, смартфона или планшета. Возможности LEGO Education Mindstorms EV3 можно расширить, купив дополнительный «Ресурсный набор».
Setup Process:
To configure the board:
-
Download the repo and unfold. Remove the -main (or any branch name) suffix of the folder.
-
Open the file OpenCat.ino, select your robot and board version.
#define BITTLE //Petoi 9 DOF robot dog: 1x on head + 8x on leg //#define NYBBLE //Petoi 11 DOF robot cat: 2x on head + 1x on tail + 8x on leg //#define NyBoard_V0_1 //#define NyBoard_V0_2 #define NyBoard_V1_0 //#define NyBoard_V1_1
- Comment out so that it will turn the code to the board configuration mode. Upload and follow the serial prompts to proceed.
// #define MAIN_SKETCH
-
If you activate , the program will automatically set up without prompts. It will not reset joint offsets but calibrate the IMU. It’s just a convenient option for our production line.
-
Plug the USB uploader to the NyBoard and install the driver if no USB port is found under Arduino -> Tools -> Port.
-
Press the upload button (->) at the top-left corner in Arduino IDE.
-
Open the serial monitor of Arduino IDE. You can find the button either under Tools, or at the top-right corner of the IDE.
Set the serial monitor as no line ending and 115200 baud rate.
The serial prompts:
Input ‘Y’ and hit enter, if you want to reset all the joint offsets to 0.
The program will do the reset, then update the constants and instinctive skills in the static memory.
- IMU (Inertial Measurement Unit) calibration.
The serial prompts:
Input ‘Y’ and hit enter, if you have never calibrated the IMU or want to redo calibration.
Put the robot flat on the table and don’t touch it. The robot will long beep six times to give you enough time. Then it will read hundreds of sensor data and save the offsets. It will beep when the calibration finishes.
When the serial monitor prints «Ready!», you can close the serial monitor to do the next step.
- Uncomment to make it active. This time the code becomes the normal program for the major functionalities. Upload the code.
#define MAIN_SKETCH
When the serial monitor prints «Ready!», the robot is ready to take your next instructions.
-
If you have never calibrated the joints’ offsets or reset the offsets in Step2, you need to calibrate them. If you boot up the robot with one side up, it will enter the calibration state automatically for you to install the legs. Otherwise, it will enter the normal rest state
-
You can use the serial monitor to calibrate it directly. Or you may plug in the Bluetooth dongle, and use the Petoi app (on Android/iOS) for a more user-friendly interface. The mobile app is available on:
For updates:
- star this repository to receive timely notifications on changes.